Construction
Aluminium parts
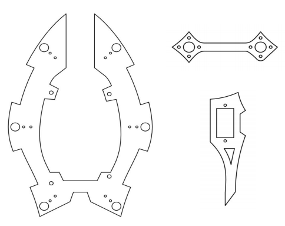
Most of the parts are cut from an aluminuim board with water-jet CNC machine. The blueprint for cutting is shown on the right. We carefully chose aluminium as the basic material for the skeleton because of his good properties such as lightness, hardness, attractive look and low chemical reactivity.

3D printed plastic parts
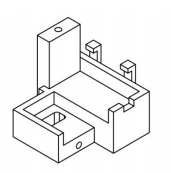
As mentiond in the Design section, we used 3D printer provided by our university to make the frames for the hips of the legs. We couldn’t do this with aluminium because the shape (on the right) is too complex. 3D printed parts are shown on the images below.

Servo motors
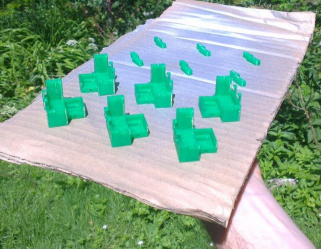
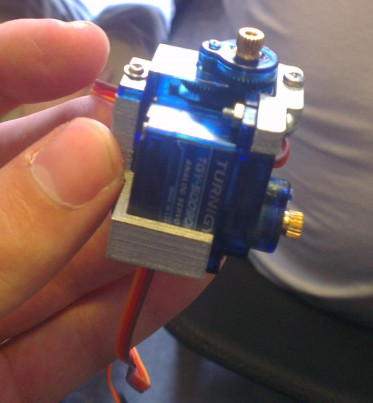
The picture on the right shows two servo motors mounted on a plastic frame. Our hexapod is propelled by 18 Turnigy servo motors. Motor specs:

| Turnigy TGY-50090M | |
|---|---|
| Input voltage | 4.8-6 V |
| Input current | max 400 mA |
| Rotation speed |
4.8 V - 0.08 sec/60 deg 6 V - 0.07 sec/60 deg |
| Torque |
4.8 V - 1.6 kgcm 6 V - 2 kgcm |
| Freedom of movement | ±90 deg |
| Dimensions | 2.31 x 1.2 x 2.59 cm |
| Mass | 9 grams |
Iduino DUE
The picture on the right shows Arduino compatible Iduino DUE microcontroller. The microcontroller is responsible for controlling the servo motors.
| Iduino DUE | |
|---|---|
| Input voltage | 7-12 V |
| Flash memory | 512 KB |
| SRAM | 96 KB |
| Processor | Atmel AT91SAM3X8E, Clock Speed 84MHz |
| Dimensions | 10.2 x 5.4 x 1.8 cm |
| Mass | 35 grams |

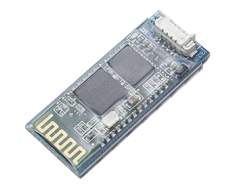
Bluetooth module
The picture on the right shows the bluetooth module. This enables the robot to establish a serial communication with the virtual controller on the Android device.
| Bluetooth Module | |
|---|---|
| Input voltage | 3.3 V |
| Input current | 50 mA |
| Range | up to 10 meters |
| Dimensions | 4.2 x 1.5 x 0.22 cm |
| Mass | 7 grams |
DC/DC converter
The picture on the right shows the DC/DC converter. The converter is capable of handling 20 A current which is more than the motors need for normal function. When all of the 18 motors perform their normal function the maximal current is ~7 A. The 20 A converter thus seems like an overkill, and the initial construction indeed had a weaker converter. However we soon found out that in the moment of switching the robot on there was a significant current surge, too great for the weaker converter. That is the reason we opted for the 20 A converter, just to be on a safe side.
| DC/DC converter | |
|---|---|
| Input voltage | 6 - 50 V |
| Output voltage | adaptive: 5V/5.5V/6V/7V/9V |
| Output current | 20 A |
| Dimensions | 5.5 x 2.5 x 1.8 cm |
| Mass | 42 grams |

Battery
The picture on the right shows the battery our robot uses. Under the normal use of the robot, the expected current from the battery is 3-4 A, which means ~30 minutes of continuous driving before the battery is drained.
| ZIPPY Flightmax 2200mAh 2S1P 20CS | |
|---|---|
| Type | lithium-ion polymer |
| Capacity | 2200 mAh |
| Output current | maximum 30 A |
| Output voltage | 7.4 V |
| Dimensions | 10.4 x 3.4 x 1.7 cm |
| Mass | 133 grams |
